

工业机器人按臂部的运动形式分为四种:直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。对于这些大家熟知的工业机器人本文不再介绍,下面我们来细分一下工业机器人的四大类!
一、多轴机器人
多轴机器人又称单轴机械手,工业机械臂,电缸等,是以XYZ直角坐标系统为基本数学模型,以伺服电机、步进电机为驱动的单轴机械臂为基本工作单元,以滚珠丝杆、同步皮带、齿轮齿条为常用的传动方式所架构起来的机器人系统,可以完成在XYZ三维坐标系中任意一点的到达和遵循可控的运动轨迹。 多轴机器人采用运动控制系统实现对其的驱动及编程控制,直线、曲线等运动轨迹的生成为多点插补方式,操作及编程方式为引导示教编程方式或坐标定位方式。
二、SCARA机器人
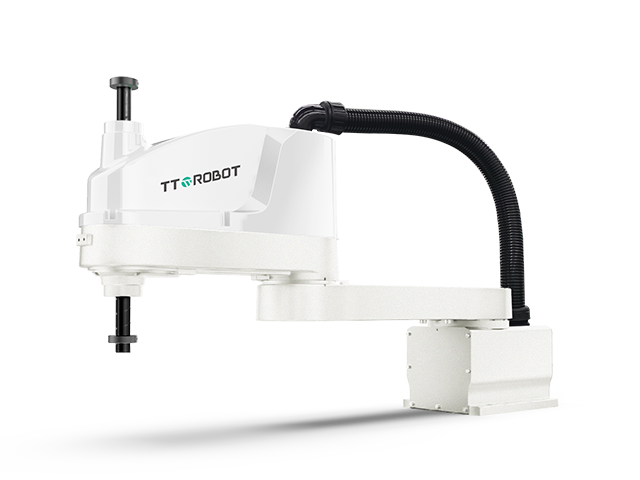
SCARA机器人是一种圆柱坐标型的特殊类型的工业机器人。SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。另一个关节是移动关节,用于完成末端件在垂直于平面的运动。手腕参考点的位置是由两旋转关节的角位移φ1和φ2,及移动关节的位移z决定的,即p=f(φ1,φ2,z),如图所示。这类机器人的结构轻便、响应快,例如新松的SRBD500并联机器人运动速度快,拾放节拍260次/min,比一般关节式机器人快数倍。它适用于平面定位,垂直方向进行装配的作业。
三、坐标机器人
坐标机器人是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。其工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。坐标机器人采用运动控制系统实现对其的驱动及编程控制,直线、曲线等运动轨迹的生成为多点插补方式,操作及编程方式为引导示教编程方式或坐标定位方式。 作为一种成本低廉、系统结构简单的自动化机器人系统解决方案,坐标机器可以被应用于点胶、滴塑、喷涂、码垛、分拣、包装、焊接、金属加工、搬运、上下料、装配、印刷等常见的工业生产领域,在替代人工,提高生产效率,稳定产品质量等方面都具备显著的应用价值。
四、串联和并联机器人
1.串联机器人其串联式结构是一个开放的运动链,其所有运动杆并没有形成一个封闭的结构链。串联机器人的工作空间大,运动分析比较容易可以避免驱动轴之间的耦合效应。但其机构各轴必须要独立控制,并且需要搭配编码器和传感器来提高机构运动时的度。而并联机器人和传统工业用串联机器人在应用上构成互补关系,它是一个封闭的运动链。并联机器人不易产生动态误差,无误差积累精度较高。另外其结构紧凑稳定,输出轴大部分承受轴向力,机器刚性高,承载能力大。但是,并联机器人在位置求解上正解比较困难,而反解容易。
2.由度并联机器人
3.自由度并联机器人
自由度并联机构种类较多,形式较复杂,一般有以下形式:
(1).平面3自由度并联机构,如3-RRR机构,它们具有2个移动和一个转动;
(2).球面3自由度并联机构,如3-UPS-1-S球面机构,该类机构的运动学正反解都很简单,是一种应用很广泛的3维移动空间机构;
(3).空间3自由度并联机构,如Delta并联机器人,这类机构属于欠秩机构,在工作空间内不同的点其运动形式不同是其显著的特点。
(4).还有一类是增加辅助杆件和运动副的空间机构。
4.自由度并联机器人
5.自由度并联机器人